



為掌握國際通信技術發展,本文參酌全球三大通信技術國際組織之技術規範,分別為國際電信聯合會( International Telecommunication Union, ITU )、第3代合作夥伴計畫(The 3rd Generation Partnership Project, 3GPP)及電機電子工程師協會(Institute of Electrical and Electronics Engineers, IEEE),以了解國際上最先進的通信技術發展趨勢。
本文針對國內外通信技術發展概況,主要盤點我國近兩年實驗網路之測試類別,並爬梳該類別在3GPP等國際組織技術規範中之通訊模式,例如網路切片、5G ORAN、車聯網與無人載具等,進一步建議各實驗網路類別可以再加以發展之通訊模式,以鼓勵我國資通訊業者與垂直場域業者發展更多元化之創新應用技術與服務,期待實驗網路的蓬勃發展將加速我國數位轉型的步伐。
全球通信技術之發展與規範,有賴於各國實驗網路之測試結果,國際上主要發布重要技術規範之組織諸如ITU、3GPP與IEEE等,透過定期籌辦工作小組會議,探討各國通信技術之創新與研發,經充分考量各國社經條件、資通訊發展落差與頻譜使用效率後,將表決結果公告於官網上,全球三大通信技術國際組織執掌內容彙整如表1,本文主要蒐集及彙整國際上車聯網通信技術、無人載具通信技術與網路切片通信技術之相關發展情形。
| ITU | 3GPP | IEEE |
|---|---|---|
|
|
IEEE主要建構完整的網路通信架構,其轄下籌組不同的任務小組(Task Group, TG),例如IEEE 802.11小組主要針對無線區域網路架構(Wireless Local Area Network, WLAN)進行WiFi效能研究,而IEEE 1609小組則主導智慧運輸技術標準架構。 |
資料來源:ITU( 2021 )、3GPP( 2021 )與IEEE( 2021 ),本文研究彙整編製。
智慧交通系統(Intelligent Transport Systems, ITS)通信技術,除車聯網通信技術測試(Vehicle-to-Everything, V2X),尚包含專用短程通信技術(Dedicated Short Range Communication, DSRC)、車聯交通基礎設施通信技術(Vehicle to Infrastructure, V2I)、車聯行人終端設備通信技術(Vehicle to Pedestrian, V2P)、車聯車通信技術(Vehicle to Vehicle, V2V)、車聯核心網路通信技術(Vehicle to Network, V2N)與行人終端設備聯核心網路通信技術(Pedestrian to Network, P2N)等,其互聯模式如圖1。
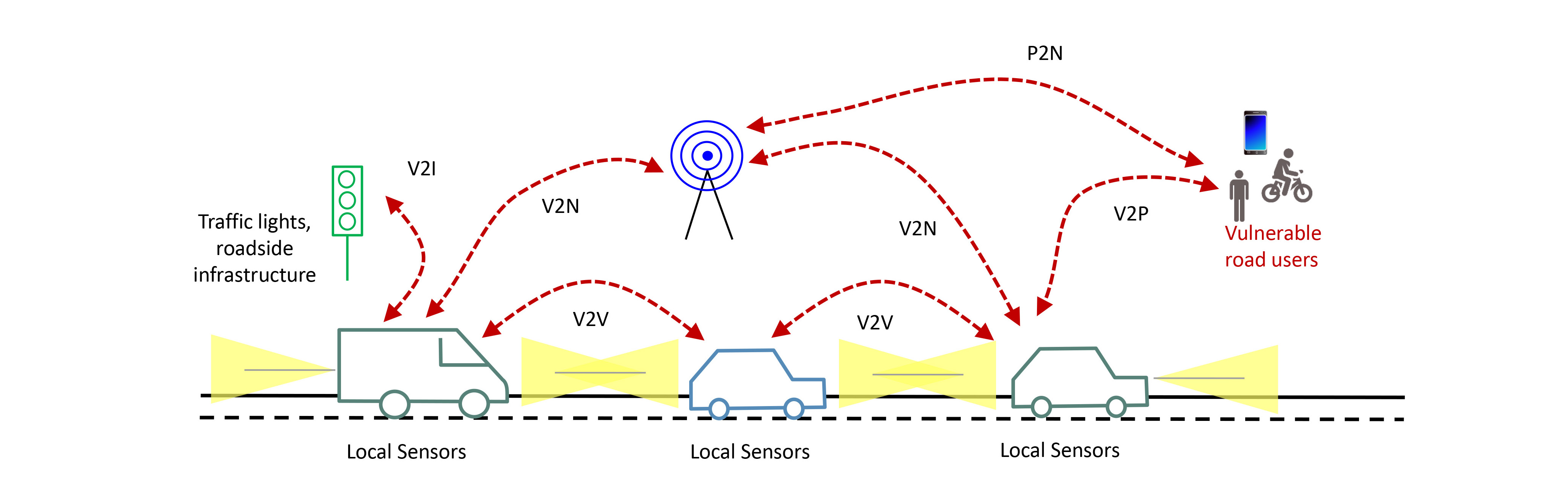
資料來源:@3G4GUK( 2019 ), Vehicle to Everything( V2X )Introduction.
早在2010年IEEE即發布智慧交通通信技術IEEE 802.11p,草擬美規、歐規與日規等相容性技術規範,至2021年已探討至IEEE 802.11p進化為IEEE 802.11bd 之可行性。3GPP之智慧交通通信技術規範可追溯自Rel-12,隨著技術的演進,目前Rel-17以探討V2X在ITU所定義的增強型行動寬頻(enhanced mobile broadband, eMBB)應用場景為主,彙整V2X通信技術規範發展如表2。
| 3GPP | IEEE |
|---|---|
Cellular V2X(C-V2X)
|
IEEE 802.11p
|
資料來源:3GPP( 2021 )與IEEE( 2021 ),本文研究彙整編製。
一套無人機系統可由一臺無人機控制器(UAV controller)同時遙控多臺無人機(Unmanned Aerial Vehicles, UAVs)組成,其網路通信方式源於3GPP的TR 21.905技術規範,主要發展通信與控制信號(Command and Control, C2)之鏈路,探討UAV與電臺間收發訊號,以及UAV與網路間傳遞訊息之情境,3GPP發布之無人機系統架構圖如圖2。

資料來源:3GPP( 2019 ),本文研究彙整編制。
早在2017年ITU便開始討論無人機通信系統架構,同時搭配3GPP的IMT-2020標準,建立了一個無人機與其控制器間的網路通信架構。IEEE則自2018年起討論自組網路(Self-Organizing Network, SON)與隨意網路(Ad Hoc Network)的通信架構、低空無人機飛航管理系統與無人機應用程式等空對空通信標準,而3GPP則自Rel-15發布TR 36.777用以增強LTE應用於無人機之功能,2019年發布TR 22.829以發展無人機支援5G特性的通信技術與應用程式,並指出無人機採用4G乃至於5G技術時,必須改善的通信介面與功能。Rel-17主要探討兩個面向,分別是TR 23.754支援UAV網路通信基礎設施之連網、識別和監視等功能,以及TR 23.755支援UAS高效運作之應用程式架構,UAS通信技術規範發展如圖3。

資料來源:IEEE Communications Standards Magazine (2021), Communications Standards for Unmanned Aircraft Systems: The 3GPP Perspective and Research Drivers
國際上ITU早在2011年即開始討論切片(Slicing)在邏輯化隔離網路分區(Logically Isolated Network Partitions,LINP)中的用途,2018年則在IMT-2020中探討網路切片的適用情境。3GPP自Rel-15即探討端到端網路切片通信技術,Rel-16則探討網路切片技術應用於5G專網架構如何增強5G的三大特性,並進一步營造5G垂直場域之發展環境,彙整網路切片通信技術結合5G專網架構規範發展如表3。
| ITU | 3GPP |
|---|---|
|
|
資料來源:ITU( 2021 )與3GPP( 2021 ),本文研究彙整編製。
然而,國際組織乃至於各國各家電信業者對於網路切片結合5G專網之模式,呈現百家爭鳴之局勢,若以5G專網架構來區別網路切片模式,大致可分為5種模式,分別說明如下:
如圖4所示,整套5G網路(gNB、UPF、5GC CP、UDM、MEC)皆布建於場域內,該場域的5G專網頻率限Local 5G頻率,並由場域主自建或委由電信業者申請頻率與布建5G專網。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Networks.
如圖5所示,整套5G網路(gNB、UPF、5GC CP、UDM、MEC)皆布建於場域內,該場域的5G專網頻率限Licensed 5G頻率,並由場域主委由電信業者申請頻率與布建5G專網。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Networks.
如圖6所示,場域內整套5G網路(gNB、UPF、5GC CP、UDM、MEC)僅gNB提供場域主與電信業者共用,其餘UPF、5GC CP、UDM和MEC仍實體隔離於場域內。透過此種場域主與電信業者共用RAN的網路切片模式,可使機器設備作業數據只儲存於5G專網場域內進行蒐集與分析,而其他高清語音通信則可轉到電信業者網域中,從而增強5G URLLC的應用(如自駕車或無人機),此模式安全性尚可。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Network.
如圖7所示,整套5G網路(gNB、UPF、5GC CP、UDM、MEC)僅UPF、MEC留在場域內,雖然網路切片使場域主與電信業者共用gNB、5GC CP、UDM,5G專網搭配此種網路切片模式有助於分割管理儲存空間,就如同gNB、5GC CP、UDM各切割成A槽與B槽,5G專網場域內的機器設備作業數據只會分別在gNB、5GC CP、UDM的A槽中傳輸、儲存與分析,而其他高清語音通信則只會分別在gNB、5GC CP、UDM的B槽中傳輸、儲存與分析。但即便此種網路切片模式能做到分割管理儲存空間,其5GC CP與UDM仍操之於電信業者手中,N2介面(場域內gNB電信業者5GC CP)及N4介面(場域內UPF-電信業者5GC CP)之安全性尚待優化。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Networks.
如圖8所示,整套5G網路(gNB、UPF、5GC CP、UDM、MEC)僅gNB留在場域內,電信業者完全掌握UPF、5GC CP、UDM、MEC,場域內5G專網蒐集到的機器設備作業數據無法傳至場域內網中,必須先傳至電信業者的UPF才能再傳至場域內網中。須留意的是,機器設備作業數據一旦經過電信業者的UPF,資料可能也會傳至電信業者的5GC CP和UDM,即便網路切片能分割管理儲存空間,場域主仍會擔心此種端到端網路切片的安全性問題。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Networks.
為驅動產業鏈結,引領數位轉型,國家通訊傳播委員會於109年7月依電信管理法規定訂定「實驗研發專用電信網路設置使用管理辦法」,期待能透過滾動式調適我國實驗網路之監理法規,打造5G垂直應用場域之優質環境,淬鍊更多創新應用服務之技術研發。
在車聯網通信技術方面,3GPP R16在TR38.885所討論的V2X通信技術應用至少包含6種情境,Rel-17則經評估Rel-16的6種情境可行性後,歸納出各國的V2X通信技術,主要發展以4G核心網路為主的非獨立組網(Non Standalone, NSA)架構,即4G核心網路串聯4G基地臺或5G基地臺及其車載終端設備,以及5G核心網路為主的獨立組網(Standalone, SA)架構。觀察我國實驗案可發現,以V2X車聯網架構而言,國內業者以4G核心網路為主的NSA架構進行實驗網路測試,主要係因5G核心網路設備尚未到位,以及多數實驗項目以4G NSA架構與技術便能蒐集測試成果,彙整3GPP R16-17 V2X通信技術應用情境如圖9。

資料來源:3GPP( 2019、2020 ),本文研究彙整編製。
在無人載具通信技術方面,依據經濟部「無人載具科技創新實驗條例」,無人載具之應用涵蓋陸、海、空等三大領域,此處所分享之無人載具通信技術,主要聚焦於空域無人機系統(Unmanned Aerial System, UAS),另我國無人機飛航管理系統(UAS Traffic Management, UTM)之運作,須依循交通部民航局蒐集與管理的500呎以上全國型無人機飛行範圍,以及400呎以下區域型無人機飛行範圍。
參考3GPP TR22.829所討論的UAS C2通信技術應用至少包含4種模式,如圖10所示,模式A為直接控制,即以UAV控制器即時連線UAV控制其飛行方向;模式B為間接控制,即以UAV控制器連至不同的RAN節點,或先經過UTM再接另一RAN節點後才能控制其飛行方向;模式C為自動飛行,即UAV完全接受UTM所提供的指令自動飛行,並定期回傳座標數據以利UTM監控;模式D則為助導航飛行,即由C2助導航設備傳送飛行方向,並可隨時更新指令。觀察國內實驗申請案件可知,截至目前為止,我國無人機以申請模式C為主,顯見國內UTM系統之發展已臻成熟,模式D之技術發展及其商機則成長可期。

資料來源:3GPP( 2019 )
在網路切片通信技術方面,自109年以來國內申請5G應用實驗案件,包含網路切片(Network Slicing)通信技術、5G專網(Non Public Network, NPN)架構與5G ORAN網路架構等應用於不同場域的測試,透過實驗測試了解網路切片在5G專網架構下更能激發5G的三大特性,惟網路切片技術結合5G專網架構時,邊緣雲間的距離易使場域內5G設備與電信業者間產生通信延遲的問題。故自110年起便大規模地展開5G ORAN架構從RAN邊緣到5GC端到端(End-to End)的測試,顯見國內各類垂直場域對於不同模式的網路切片通信技術及其解決方案之殷切需求。觀察國內申請實驗案件之網路切片類別,5G專網架構下的網路切片模式,大致可分為實體隔離型5G專網(模式一與模式二)與網路切片型5G專網(模式三、模式四與模式五)兩大類別,5G專網架構下的網路切片模式概念圖如圖11。

資料來源:Harrison J. Son( 2019 ), 7 Deployment Scenarios of Private 5G Networks.
自109年以來,我國實驗網路申請案,主要以車聯網通信技術、無人載具通信技術及網路切片通信技術為大宗,我國垂直場域業者為了研發各項網路切片通信技術,各種情境之網路切片技術在日積月累下,逐漸朝向國際上獨立組網(Standalone, SA)的架構來發展,為了進一步打造更優質測試條件,我國技術研發團隊更積極地向世界通信大會(Mobile World Congress, MWC)提出並通過5G ORAN端到端專網系統,顯見我國垂直場域業者與資通訊產業技術研發之實力堅強。與此同時,自109年起電信業者投入的垂直場域包含智慧城市、智慧能源、智慧農業、智慧交通、智慧行動裝置、智慧建築、智慧醫療、智慧工廠、智慧娛樂、智慧場館、智慧零售、智慧管理與智慧支付等多元應用服務類型。在各界共同努力下,相信未來5G的應用將會激盪出更多精彩的創新服務及商業模式。
檢視近兩年實驗案件,國內業者具各大垂直場域技術研發之衝勁與堅持,尤其是有關網路切片通信技術所需之獨立組網架構及其解決方案,惟為促進產業創新與應用發展,實驗網路法規僅以低度管制的方式鼓勵業者研發並突破其技術限制,然若為利主管機關能更進一步調適法規環境,建議宜特別在個別實驗案件系統架構圖中,凸顯整套核心網路、基地臺與終端設備之配置與連線方式,如此除可釐清國內外不同解決方案關鍵技術之差異,往後在制定基地臺與網路設置、管理暨審驗相關辦法時,主管機關方能快速剖析得予放寬之程度。期待未來能透過實驗網路蓬勃發展,加速推動我國數位轉型之巨輪,塑造我國成為數位經濟之領先國家。![]()





